![]()
本研究室では,制御理論を駆使した新しい電気電子システムの研究開発を行っています。電気自動車・電車・ロボット等に使われているいろいろなモータやエネルギーを変換する電力システムについて,その制御をどうするか?ということは重要で面白いテーマです。
本研究室では,主に電力変換器(インバータ,チョッパ等)を利用するシステムの制御と応用,交流電動機(同期機,誘導機)の制御の2種類の研究を行っています。テーマ毎に理論解析・シミュレーションや実験検証を行い,研究を進めます。 実験ではディジタル制御システム(DSP, FPGA)や電力変換回路を用いたハードウェアとソフトウェアの技術を用いています。
各研究テーマについて,解析ではプログラミング言語(C言語)や専用の解析ソフト(PSIM, PLECS等)を用いて安定解析・シミュレーションを行い,実験では DSP, FPGA, A/D変換器, インバータ等を組み合わせたディジタル制御装置を用いた実験や,はんだ付けで基板を作成して実験装置の構築を行い,動作の検証・データ収集等を行います。
〇 電力変換器を用いたシステムの制御と応用
(1) モジュラーマルチレベルコンバータ(MMC:Modular Multi-level Converter)の制御
MMCはトランスを用いない次世代の新しい電力変換システムとして期待されています。複数のコンバータを組み合わせてモジュール化し,マルチレベル出力で歪みの少ない電力変換による系統連系用システムの新方式を研究します。
MMCの種類として,三相AC-AC変換用の六角形MMC(H-MMC)をはじめ,単相・三相AC/AC用MMC,DC-AC変換用MMCなどの研究を行っています。応用として,電力系統用のパワーコンディショナやパワーフローコントローラ,電気自動車用急速充電器などがあります。
(2) SiCインバータの応用
SiCは次世代の新しい半導体デバイスで,高効率・大電力のインバータを実現できます。SiCインバータの応用として,高周波数スイッチング用途の電力用アクティブフィルタや無線電力伝送用アクティブキャパシタなどの制御方式を研究します。
(3) UPFC, LPCの制御
UPFC (Unified Power Flow Controller)やLPC (Loop Power Controller)は電力流量を管理して電力系統の品質・安定性を向上させる電力用システムです。ディジタル制御や現代制御理論を用いて,電圧低下,無効電力,三相不平衡の補償などの機能について制御方式を研究します。
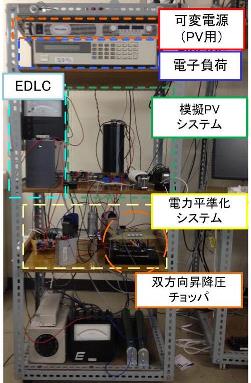
(4) スマートグリッド用電力平準化システムの制御
太陽光・風力発電システム(分散型電源・スマートグリッド)に蓄電池や電気二重層キャパシタ(EDLC)と昇降圧チョッパを組み合わせた電力平準化システムの制御について,効率の良いエネルギー利用のための制御方式を研究します。
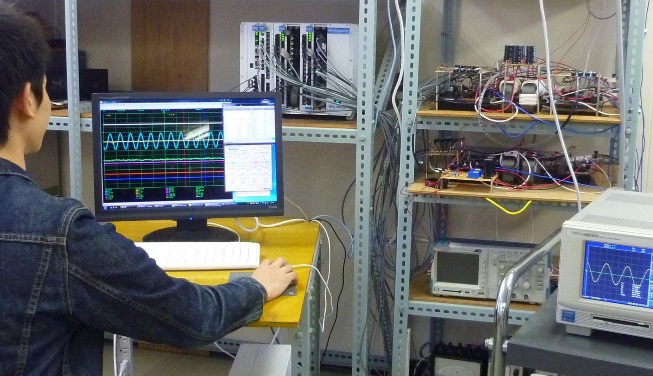
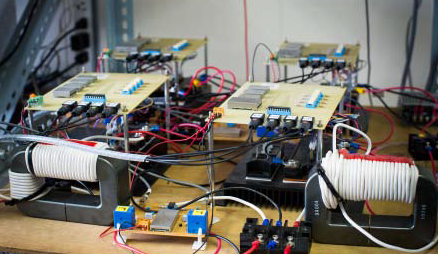
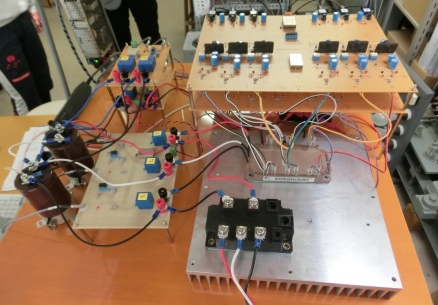
MMC実験システム H-MMC主回路
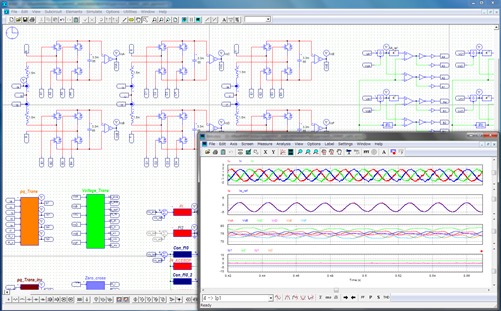
電力平準化実験システム 回路解析シミュレーション(PSIM)
〇 交流電動機の制御
誘導モータは安価で保守が容易などの特徴を持ち、家庭用から産業用まで広く普及しています。同期モータは高効率・高精度な制御が可能で、産業用に広く利用されつつあります。
(1) 永久磁石同期モータの位置センサレス制御
永久磁石同期モータの位置センサを省いた制御(位置センサレス制御)について,より広い速度範囲での運転を可能とする高周波信号重畳方式を研究しています。具体的には,理論検証のために専用解析ソフトを利用したり,実際にセンサ等のアナログ回路を設計し,はんだ付けで基板作成して実験システムを構築していくことも行いながら研究します。また,モータの特性を反映した数値解析用モデルの導出も研究します。
(2) 3レベルインバータによる誘導機駆動の制御
歪みの少ない電圧を出力する3レベルインバータを用いた誘導モータの制御を研究します。誘導機や3レベルインバータの制御方式の研究や実験のハードウェア基板回路作製,FPGAによるロジック回路作成などを行います。デッドタイムなどによる出力電圧誤差の補償方法についても研究しています。

交流電動機実験システム 電力変換回路(3レベルインバータ)
〇 その他・過去の研究テーマ
(1) ウェーブレット解析の応用
本研究は、電力システムから検出したデータ(電圧・電流)をウェーブレット変換により波形解析し、故障診断に役立てる研究です。簡単かつ高速に処理するアルゴリズムで正しい診断を行うことがテーマです。べき級数型ウェーブレット関数とz変換を利用した新しいウェーブレット変換方式を用いたオンライン周波数推定についての研究です。
(2) モーションコントロールによる倒立振子の制御
ACサーボモータを組み込んだロボットアームを使って、倒立振子と呼ばれる立てた棒を倒れないようにする制御を行います。制御にはアームの位置制御・力制御、ACモータ (永久磁石同期モータ)のベクトル制御など様々な制御理論を使います。
 |
||||
| モーションコントロール実験装置 | ||||
Up:研究室TOP